08.01 Automated Flight Management Systems
Aim
At the end of this lesson, you should be able to correctly:
- Use automated flight management systems for RPA;
- Understand the limitations of an automated flight management system;
- Identify faults with automated flight management system;
- Identify and understand the behavior of an automated flight management system in abnormal and emergency situations (for example, loss of control, loss of thrust);
- Understand the relevant precautions of programming an automated flight management system;
- Understand the implications of operating with a degraded automated flight management system (for example, no GPS, IMU failure).
Automated Flight Management Systems
To be considered as ‘autonomous’ a system must have the ability to: •Gain information about the environment •Work (for an extended period) without human intervention •Move throughout its operating environment without human assistance •Avoid situations that are harmful to itself, people or property
An autonomous system may also learn or gain new capabilities like adjusting strategies for accomplishing its tasks or adapting to changing surroundings.
Autonomous systems will still require regular maintenance, as do other machines.
(Sound like something from Star Trek?)
Autonomous Vs. Automated
What designates a machine as fully-autonomous as opposed to automated?
An autonomous machine may learn or gain new capabilities like adjusting strategies for accomplishing its task(s) or adapting to changing surroundings
Automated functions however will make machines less dependent on the human operator, – but they will still need human intervention!
In this case (our case) it is the Pilot in Command that is responsible!
If the Pilot in Command commands a crash, the aircraft WILL crash!
Autopilots
What is an autopilot?
In reality an autopilot is nothing more than a dedicated microprocessor, with a number of specific inputs and outputs, and a set program to follow!
IT IS NOT AUTONOMOUS – IT IS AN “AUTOMATIC PILOT”
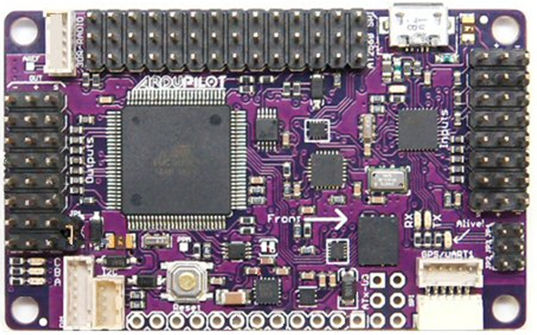
The salient features of this piece of equipment include:
- Small in size and light in weight!
- Energy efficient
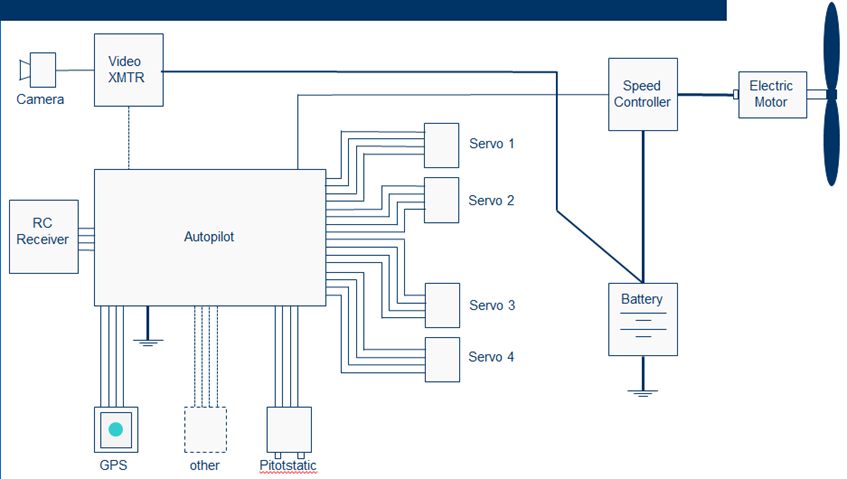
- Provision for all necessary sensors, including:
- GPS
- Accelerometers
- Compass
- Gyros
- Pitot tube
- Pressure Sensor
Includes Radio Control & Ground Control Station Interface
Heart of The System
Autopilot Functions
Autopilots can not think, can not plan, and can not adapt to changes in circumstances. Autopilots simply follow the program they have had uploaded.
Before you can employ an autopilot to carry out a task, YOU have to be able to do that task yourself.
When planning a flight/mission it is not sufficient to ONLY think of what is to be done – you also have to think of what might go wrong, and then build in provision for that.
The ultimate responsibility for the mission and its safe execution rests with the PILOT. (….but the autopilot told me to do it is not an excuse!)
…by careful thought, extensive planning, and previous flight experience.
For example:
- We don’t just launch the aircraft and commit it immediately to the mission.
- Plan the mission, location, duration, fuel reserves, emergency landing places….. (the human)
- Pre-flight and launch the aircraft. (the human)
- Enter the take-off rally
- The human intervenes and confirms battery health, signal strength, aircraft trim etc. – while the aircraft is in a controlled environment, at a controlled location.
- The human commits the aircraft to the mission ONLY WHEN THE HUMAN is HAPPY TO PROCEED.
- The human will have in place fail-safes for occurrences such as loss of communications, low battery, loss of GPS
Fixed Wing Flight Modes
| Mode | Annunciation | Function |
| Unassisted | UNAS | Co-pilot has full control over attitude with autopilot disengaged |
| Fly-By-Wire | FBW A | – co-pilot has restricted control over attitude with autopilot engaged – autopilot will return aircraft to flat and level when no control input is commanded – continuous control inputs required to maintain heading and height |
| Navigation | NAV | |
| Return to Launch | RTL | – autopilot has control over aircraft – airframe will track direct from present position to starting point – if > set height, present height will be maintained – if < set height, airframe will climb to the set RTL height then track to launch site – once aircraft above launch position, aircraft will loiter – mode cancelled by cycling RTL switch |
Note:
- Manual flight modes = UNAS, STAB, HH, FBW A
- Auto flight modes = Loiter, NAV
Multi Rotor Flight Modes
| Mode | Annunciation | Function |
| Stabilise | STAB | – co-pilot has full control over attitude with autopilot engaged – autopilot will return aircraft to flat and level when no control input is commanded – continuous control inputs required to maintain position and height |
| Height Hold | HH | – co-pilot has control with autopilot engaged (Barometric sensor on autopilot) – throttle lever in neutral position, aircraft will maintain height with no pilot input – co-pilot makes roll / heading inputs to maintain station / manoeuvre laterally |
| Loiter | Loiter | – co-pilot has control over GPS position with autopilot engaged – when co-pilot releases sticks to, autopilot uses GPS to hold current location |
| Navigation | NAV | – only selected ON when authorised by Pilot-In-Charge – when selected ON, autopilot has control over aircraft, Pilot-In-Charge has control through the GCS – when selected ON, autopilot will command the aircraft to navigate to the active waypoint (WP) – once the active WP is reached, the autopilot will set the next waypoint as active, navigating through the WP list – when selected OFF, co-pilot regains attitude control of aircraft dependant on previously set flight mode |
| Return to Launch | RTL | – autopilot has control over aircraft – airframe will track direct from present position to starting point – if > set height, present height will be maintained – if < set height, airframe will climb to the set RTL height then track to launch site – at launch site, hover for 5 secs, auto land, then motor shutdown and disarm – mode cancelled by cycling RTL switch to OFF |
Automated Flight Management Systems in Abnormal Situations
Critical Battery
Multi Rotor:
- Manual flight modes: land as soon as possible
- Auto Flight Modes: Autopilot will initiate RTL
- GCS annunciations (Low Battery; Critical Battery – RTL or LAND NOW)
Fixed Wing:
- Manual flight modes: land as soon as possible
- Auto Flight Modes: Autopilot will initiate RTL and loiter above launch site
- GCS annunciations (Low Battery; Critical Battery – RTL or LAND NOW)
Loss of GCS link + 10 seconds
Multi Rotor:
- Manual flight modes: Autopilot will switch mode to RTL
- Auto Flight Modes: Autopilot will initiate RTL
- GCS annunciations (LOSS OF GCS CONNECTION)
- Co-pilot can cycle mode switch and take manual control
Fixed Wing:
- Manual flight modes: Autopilot will switch mode to RTL
- Auto Flight Modes: Autopilot will initiate RTL loiter above launch site
- GCS annunciations (LOSS OF GCS CONNECTION)
- Co-pilot can cycle mode switch and take manual control
Loss of RC link
Multi Rotor:
- Manual flight modes: Autopilot will switch mode to RTL
- Auto Flight Modes: Autopilot will initiate selected failsafe response (RTL or continue with mission)
- GCS annunciations (LOSS OF RC CONNECTION)
Fixed Wing:
- Manual flight modes: Autopilot will switch mode to RTL
- Auto Flight Modes: Autopilot will initiate selected failsafe response (RTL or continue with mission)
- GCS annunciations (LOSS OF RC CONNECTION)
GNSS Loss
Multi Rotor:
- Manual flight modes: No effect on control, co-pilot can land aircraft if required
- Auto Flight Modes: co-pilot to change to manual flight mode and land aircraft if required
- GCS annunciations (NO GPS)
Fixed Wing:
- Manual flight modes: No effect on control, co-pilot can land aircraft if required
- Auto Flight Modes: co-pilot to change to manual flight mode and land aircraft if required
- GCS annunciations (NO GPS)
Geo-fence
Multi Rotor:
- Manual flight modes: Autopilot will switch mode to RTL if fence is breached. A new fence is erected 20m past original fence. If fences are breached out to 100m past the original fence, autopilot will forces aircraft to land
- Auto Flight Modes: If in Loiter, autopilot will not allow movement outside of geo-fence. A breach to the fence in NAV will share the response of manual flight modes
- GCS annunciations (GEO-FENCE BREACH, RTL or LAND)
Fixed Wing
- Manual flight modes: Autopilot will switch to an auto flight mode and return to a predetermined point to loiter inside the fence boundary. Co-pilot can then cycle flight modes to regain control
- Auto Flight Modes: Autopilot will switch to an auto flight mode and return to a predetermined point to loiter inside the fence boundary. Co-pilot can then cycle flight modes to regain control
- GCS annunciations (GEO-FENCE BREACH, GUIDED MODE)
IMU Failure
IMU failure in a multi rotor or fixed wing aircraft is a catastrophic event.
The aircraft will be uncontrollable and the co-pilot can attempt to switch to the most manual flight mode available. If the aircraft is still in an uncontrollable state, the co-pilot is to inform everyone in the immediate area by annunciating:
“MAYDAY MAYDAY MAYDAY – CONTROL LOST”
A sad pilot
Once aircraft is on the ground, Pilot In Charge will attempt to disarm and render safe.
Summary
- A remotely piloted aircraft system is nothing more than a tool. It simply facilitates our doing something.
- Our work is not about the flying – it is usually about the data we collect for someone else to use.
- These systems have not achieved ‘self-awareness’. They can not be left unattended while you go off to make a cup of tea!
- The system can only be as reliable and functional as you let it. (maintenance – maintenance – maintenance)
- Don’t rationalise away mishaps when they happen. Try to understand and learn from your experiences. The autopilot cant do this, but it may be able to help you (the human) to do so.